Stepper Motor
A stepper motor is a unique type of DC motor that rotates in fixed steps of a certain number of degrees. They have multiple coils that are organized in groups called "phases". By energizing each phase in sequence, the motor will rotate one step at a time. Stepper motors can be controlled to a high degree of accuracy and hold at one of these steps without any feedback sensor (an open-loop controller).
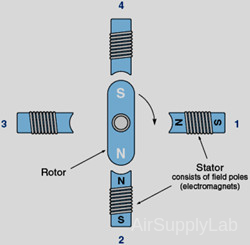
Figure 1: Internal Components of a Stepper Motor
A stepper motor consists of a rotor and stator. In the figure 1 case, the rotor is a permanent magnet, and the stator is made up of electromagnets (field poles). The rotor will move (or step) to align itself with an energized field magnet. If the field magnets are energized one after the other around the circle, the motor can be made to move in a complete circle.
There are two majorly types of stepper motor: unipolar and bipolar stepper motor.
Unipolar Stepper Motors
Bipolar Stepper Motors
Bipolar stepper motors can be a bit more difficult to operate, and the unipolar motor does feature twice the amount of wire in the same space.
The advantages of stepper motors:
- Can operate in an open-loop control system:
The controller can know the exact position of the motor shaft without the need of position sensors. This is done by simply counting the number of steps taken from a known reference position. Step size is determined by the number of rotor and stator poles. - There is no cumulative error:
The angle error does not increase, regardless of the number of steps taken. In fact, most stepper motor systems operate open-loop — that is, the controller sends the motor a determined number of step commands and assumes the motor goes to the right place. A common example is the positioning of the read/write head in an ink printer. - Steppers have inherently low velocity and therefore are frequently used without gear reductions. A typical unit driven at 500 pulses/second rotates at only 150 rpm.
- Stepper motors can easily be controlled to turn at 1 rpm or less with complete accuracy.
Question 1
Question:
A 15°/step stepper motor is given 64 steps CW (clockwise) and 12 steps CCW (counterclockwise). Assuming it started at 0°, find the final position.
Answer:
After completing 64 steps CW and 12 steps CCW, the motor has ended up 52 steps CW (64 - 12 = 52). Because there are 24 15°-steps per revolution (360°/15° = 24),

Therefore, the motor has made two complete revolutions and is now sitting at 60° CW from where it started.
Question 2